
Within the operation, it is necessary to make decisions about where AGVs should go and which route they should take according to certain rules, and this task is undertaken by the System Designer.
The distance and routes taken by the AGV are calculated by the vehicle itself, but in addition to the information obtained from a single data point, another technology that can locate the vehicle should be used and verified. This ensures that the vehicle’s location is always up to date and ensures that it has not taken the wrong route and that the product has been picked up and delivered from the correct points.
The basic function of navigation technologies is to ensure the accuracy of the vehicle’s location. These technologies need to be continuously developed to enable faster and more accurate navigation on given routes, and different methods, either single or in combination, can be used according to the needs of the business and processes.

Laser Navigation
To determine its position, the AGV captures the reflections from cylindrical or planar reflectors placed within the facility, and calculates the angle and distance.
Laser navigation provides a great deal of flexibility to the system. Reflector installation without any ground processing and electronic preparation of routes enable changes in operations to be easily implemented on the vehicles whenever needed.
Working with this navigation system also provides you with the following benefits:
- The vehicle can be integrated into the system even when it is in a waiting position or outside the designated routes once it is started.
- Both angle and distance information from the reflectors and information from the wheels are cross-checked to achieve a positioning accuracy of up to ±5mm.
- Vehicles are immune to unwanted signals reflected from other objects thanks to the high-tech laser scanner device. It also reports any erroneous reflections it receives, ensuring that you are always sure that your vehicle is not on the wrong path.
- Since the scanner can measure laser reading accuracy levels, maintenance can be performed or parts can be replaced without experiencing any errors. This way, you can always be sure that your vehicle is not going the wrong way.
- Positioning accuracy is increased in laser navigation, and the vehicle constantly verifies its position while moving. The technology of the signal processor enables operation at speeds of up to 3m/s.

Magnetic Tape Navigation
These are the systems in which vehicles determine their position by tracking magnetic strips and control points placed on the ground. They are commonly used in vehicles that transport goods, in corridors, or in narrow shelf spaces.
- Suitable for vehicles that require different maneuvering capabilities.
- Used in areas where reflector placement is not feasible or requires a large number of reflectors (e.g. corridors).
- The equipment used is suitable for small-sized vehicles.
- When the vehicle cannot determine its position based on the magnetic tape, it switches to error mode and avoids incorrect routes.
- Supports speeds up to 1.2 m/s.

Spot Navigation
This technology involves vehicles counting specific points and gaps on the floor to determine their position. It calculates the vehicle’s position based on the position of its wheels and verifies it with the determining points on the floor. The vehicle’s position is updated on the system each time it passes a determining point.
- Used in areas where reflector placement is not possible or requires many reflectors (e.g. corridors).
- If the vehicle cannot determine its position using the ground markers, it enters error mode and avoids incorrect routes.
- Supports speeds up to 1.2 m/s.
- Suitable for vehicles requiring different maneuvering capabilities.
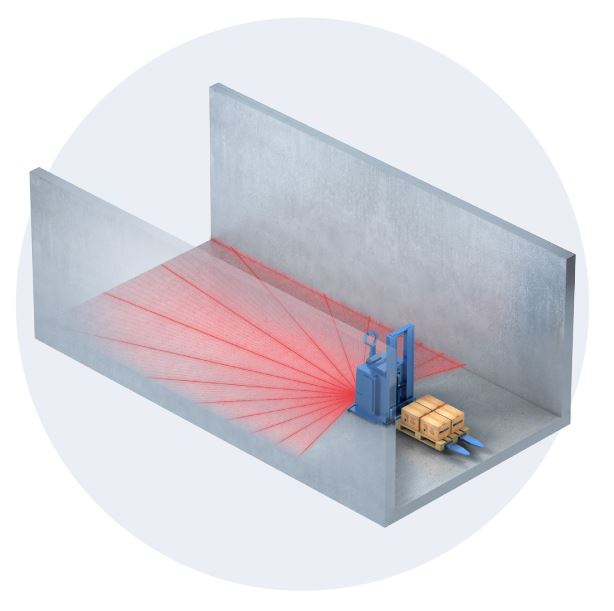
Range Navigation
The system calculates angle and distance through the planes (e.g. walls) within the facility to determine its position. It can be applied in narrow workspaces and does not require additional equipment if a compatible sensor is used.
- It can be used in areas where reflector placement is not possible or requires a lot of effort (such as corridors, etc.). It is often preferred in automatic vehicle loading operations.
- It is suitable for small vehicles due to the equipment used.
- It supports speeds up to 1.2 m/s.

Inductive Wired Navigation
The system calculates angle and distance through surfaces (such as walls) inside the facility to determine its position. It can be applied in narrow working areas and does not require extra equipment if a compatible sensor is used. On the other hand, systems that determine the position of vehicles by tracking the inductive line and control points placed on the ground are called inductive systems.
- Suitable for areas where reflector placement is not possible or required, such as corridors.
- Suitable for small vehicles due to the equipment used.
- Supports speeds up to 1.2 m/s.
It can be applied in narrow working areas, and if a compatible sensor is used, there is no need for extra equipment.
- Suitable for areas where reflector placement is not feasible or requires a large number of reflectors, such as corridors.
- Typically preferred in automatic vehicle loading operations.
- Suitable for small-sized vehicles due to the equipment used.
- Supports speeds up to 1.2 m/s.
Multi Navigation
Overall, when looking at all types of navigation, it can be seen that each has its own advantages and disadvantages. To benefit from the positives of both navigation systems and balance out their negative aspects, they can be used together. Such an application can be used, for example, when you do not want to give up flexibility in general transport areas and want to stack with the same vehicles in narrow spaces.
Lazer Nav. | Spot Nav. | Manyetik Bant Nav. | Range Nav. | |
|---|---|---|---|---|
Lazer Nav. | ✓ | |||
Spot Nav. | ✓ | ✓ | ||
Manyetik Bant Nav. | ✓ | |||
Range Nav. | ✓ | ✓ |